|
|



              
QMatrix Class Reference |
void SimpleTransformation::paintEvent(QPaintEvent *)
{
QPainter painter(this);
painter.setPen(QPen(Qt::blue, 1, Qt::DashLine));
painter.drawRect(0, 0, 100, 100);
painter.rotate(45);
painter.setFont(QFont("Helvetica", 24));
painter.setPen(QPen(Qt::black, 1));
painter.drawText(20, 10, "QMatrix");
}
|
Although these functions are very convenient, it can be more efficient to build a QMatrix and call QPainter::setMatrix() if you want to perform more than a single transform operation. For example:
void CombinedTransformation::paintEvent(QPaintEvent *)
{
QPainter painter(this);
painter.setPen(QPen(Qt::blue, 1, Qt::DashLine));
painter.drawRect(0, 0, 100, 100);
QMatrix matrix;
matrix.translate(50, 50);
matrix.rotate(45);
matrix.scale(0.5, 1.0);
painter.setMatrix(matrix);
painter.setFont(QFont("Helvetica", 24));
painter.setPen(QPen(Qt::black, 1));
painter.drawText(20, 10, "QMatrix");
}
|
Basic Matrix Operations
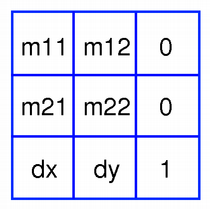
A QMatrix object contains a 3 x 3 matrix. The dx and dy elements specify horizontal and vertical translation. The m11 and m22 elements specify horizontal and vertical scaling. And finally, the m21 and m12 elements specify horizontal and vertical shearing.
QMatrix transforms a point in the plane to another point using the following formulas:
x' = m11*x + m21*y + dx
y' = m22*y + m12*x + dy
The point (x, y) is the original point, and (x', y') is the transformed point. (x', y') can be transformed back to (x, y) by performing the same operation on the inverted() matrix.
The various matrix elements can be set when constructing the matrix, or by using the setMatrix() function later on. They also be manipulated using the translate(), rotate(), scale() and shear() convenience functions, The currently set values can be retrieved using the m11(), m12(), m21(), m22(), dx() and dy() functions.
Translation is the simplest transformation. Setting dx and dy will move the coordinate system dx units along the X axis and dy units along the Y axis. Scaling can be done by setting m11 and m22. For example, setting m11 to 2 and m22 to 1.5 will double the height and increase the width by 50%. The identity matrix has m11 and m22 set to 1 (all others are set to 0) mapping a point to itself. Shearing is controlled by m12 and m21. Setting these elements to values different from zero will twist the coordinate system. Rotation is achieved by carefully setting both the shearing factors and the scaling factors.
Here's the combined transformations example using basic matrix operations:
void BasicOperations::paintEvent(QPaintEvent *)
{
double pi = 3.14;
double a = pi/180 * 45.0;
double sina = sin(a);
double cosa = cos(a);
QMatrix translationMatrix(1, 0, 0, 1, 50.0, 50.0);
QMatrix rotationMatrix(cosa, sina, -sina, cosa, 0, 0);
QMatrix scalingMatrix(0.5, 0, 0, 1.0, 0, 0);
QMatrix matrix;
matrix = scalingMatrix * rotationMatrix * translationMatrix;
QPainter painter(this);
painter.setPen(QPen(Qt::blue, 1, Qt::DashLine));
painter.drawRect(0, 0, 100, 100);
painter.setMatrix(matrix);
painter.setFont(QFont("Helvetica", 24));
painter.setPen(QPen(Qt::black, 1));
painter.drawText(20, 10, "QMatrix");
}
|
See also QPainter, The Coordinate System, and Affine Transformations Demo.
Member Function Documentation
QMatrix::QMatrix ()
Constructs an identity matrix.
All elements are set to zero except m11 and m22 (specifying the scale), which are set to 1.
See also reset().
QMatrix::QMatrix ( qreal m11, qreal m12, qreal m21, qreal m22, qreal dx, qreal dy )
Constructs a matrix with the elements, m11, m12, m21, m22, dx and dy.
See also setMatrix().
QMatrix::QMatrix ( const QMatrix & matrix )
Constructs a matrix that is a copy of the given matrix.
qreal QMatrix::m11 () const
Returns the horizontal scaling factor.
See also scale() and Basic Matrix Operations.
qreal QMatrix::m12 () const
Returns the vertical shearing factor.
See also shear() and Basic Matrix Operations.
qreal QMatrix::m21 () const
Returns the horizontal shearing factor.
See also shear() and Basic Matrix Operations.
qreal QMatrix::m22 () const
Returns the vertical scaling factor.
See also scale() and Basic Matrix Operations.
qreal QMatrix::det () const
Returns the matrix's determinant.
qreal QMatrix::dx () const
Returns the horizontal translation factor.
See also translate() and Basic Matrix Operations.
qreal QMatrix::dy () const
Returns the vertical translation factor.
See also translate() and Basic Matrix Operations.
QMatrix QMatrix::inverted ( bool * invertible = 0 ) const
Returns an inverted copy of this matrix.
If the matrix is singular (not invertible), the returned matrix is the identity matrix. If invertible is valid (i.e. not 0), its value is set to true if the matrix is invertible, otherwise it is set to false.
See also isInvertible().
bool QMatrix::isIdentity () const
Returns true if the matrix is the identity matrix, otherwise returns false.
See also reset().
bool QMatrix::isInvertible () const
Returns true if the matrix is invertible, otherwise returns false.
See also inverted().
void QMatrix::map ( qreal x, qreal y, qreal * tx, qreal * ty ) const
Maps the given coordinates x and y into the coordinate system defined by this matrix. The resulting values are put in *tx and *ty, respectively.
The coordinates are transformed using the following formulas:
x' = m11*x + m21*y + dx
y' = m22*y + m12*x + dy
The point (x, y) is the original point, and (x', y') is the transformed point.
See also Basic Matrix Operations.
void QMatrix::map ( int x, int y, int * tx, int * ty ) const
This is an overloaded member function, provided for convenience.
Maps the given coordinates x and y into the coordinate system defined by this matrix. The resulting values are put in *tx and *ty, respectively. Note that the transformed coordinates are rounded to the nearest integer.
QPointF QMatrix::map ( const QPointF & point ) const
This is an overloaded member function, provided for convenience.
Creates and returns a QPointF object that is a copy of the given point, mapped into the coordinate system defined by this matrix.
QPoint QMatrix::map ( const QPoint & point ) const
This is an overloaded member function, provided for convenience.
Creates and returns a QPoint object that is a copy of the given point, mapped into the coordinate system defined by this matrix. Note that the transformed coordinates are rounded to the nearest integer.
QLineF QMatrix::map ( const QLineF & line ) const
This is an overloaded member function, provided for convenience.
Creates and returns a QLineF object that is a copy of the given line, mapped into the coordinate system defined by this matrix.
QLine QMatrix::map ( const QLine & line ) const
This is an overloaded member function, provided for convenience.
Creates and returns a QLine object that is a copy of the given line, mapped into the coordinate system defined by this matrix. Note that the transformed coordinates are rounded to the nearest integer.
QPolygonF QMatrix::map ( const QPolygonF & polygon ) const
This is an overloaded member function, provided for convenience.
Creates and returns a QPolygonF object that is a copy of the given polygon, mapped into the coordinate system defined by this matrix.
QPolygon QMatrix::map ( const QPolygon & polygon ) const
This is an overloaded member function, provided for convenience.
Creates and returns a QPolygon object that is a copy of the given polygon, mapped into the coordinate system defined by this matrix. Note that the transformed coordinates are rounded to the nearest integer.
QRegion QMatrix::map ( const QRegion & region ) const
This is an overloaded member function, provided for convenience.
Creates and returns a QRegion object that is a copy of the given region, mapped into the coordinate system defined by this matrix.
Calling this method can be rather expensive if rotations or shearing are used.
QPainterPath QMatrix::map ( const QPainterPath & path ) const
This is an overloaded member function, provided for convenience.
Creates and returns a QPainterPath object that is a copy of the given path, mapped into the coordinate system defined by this matrix.
QRectF QMatrix::mapRect ( const QRectF & rectangle ) const
Creates and returns a QRectF object that is a copy of the given rectangle, mapped into the coordinate system defined by this matrix.
The rectangle's coordinates are transformed using the following formulas:
x' = m11*x + m21*y + dx
y' = m22*y + m12*x + dy
If rotation or shearing has been specified, this function returns the bounding rectangle. To retrieve the exact region the given rectangle maps to, use the mapToPolygon() function instead.
See also mapToPolygon() and Basic Matrix Operations.
QRect QMatrix::mapRect ( const QRect & rectangle ) const
This is an overloaded member function, provided for convenience.
Creates and returns a QRect object that is a copy of the given rectangle, mapped into the coordinate system defined by this matrix. Note that the transformed coordinates are rounded to the nearest integer.
QPolygon QMatrix::mapToPolygon ( const QRect & rectangle ) const
Creates and returns a QPolygon representation of the given rectangle, mapped into the coordinate system defined by this matrix.
The rectangle's coordinates are transformed using the following formulas:
x' = m11*x + m21*y + dx
y' = m22*y + m12*x + dy
Polygons and rectangles behave slightly differently when transformed (due to integer rounding), so matrix.map(QPolygon(rectangle)) is not always the same as matrix.mapToPolygon(rectangle).
See also mapRect() and Basic Matrix Operations.
void QMatrix::reset ()
Resets the matrix to an identity matrix, i.e. all elements are set to zero, except m11 and m22 (specifying the scale) which are set to 1.
See also QMatrix(), isIdentity(), and Basic Matrix Operations.
QMatrix & QMatrix::rotate ( qreal degrees )
Rotates the coordinate system the given degrees counterclockwise.
Note that if you apply a QMatrix to a point defined in widget coordinates, the direction of the rotation will be clockwise because the y-axis points downwards.
Returns a reference to the matrix.
See also setMatrix().
QMatrix & QMatrix::scale ( qreal sx, qreal sy )
Scales the coordinate system by sx horizontally and sy vertically, and returns a reference to the matrix.
See also setMatrix().
void QMatrix::setMatrix ( qreal m11, qreal m12, qreal m21, qreal m22, qreal dx, qreal dy )
Sets the matrix elements to the specified values, m11, m12, m21, m22, dx and dy.
Note that this function replaces the previous values. QMatrix provide the translate(), rotate(), scale() and shear() convenience functions to manipulate the various matrix elements based on the currently defined coordinate system.
See also QMatrix().
QMatrix & QMatrix::shear ( qreal sh, qreal sv )
Shears the coordinate system by sh horizontally and sv vertically, and returns a reference to the matrix.
See also setMatrix().
QMatrix & QMatrix::translate ( qreal dx, qreal dy )
Moves the coordinate system dx along the x axis and dy along the y axis, and returns a reference to the matrix.
See also setMatrix().
bool QMatrix::operator!= ( const QMatrix & matrix ) const
Returns true if this matrix is not equal to the given matrix, otherwise returns false.
QMatrix QMatrix::operator* ( const QMatrix & matrix ) const
Returns the result of multiplying this matrix by the given matrix.
Note that matrix multiplication is not commutative, i.e. a*b != b*a.
QMatrix & QMatrix::operator*= ( const QMatrix & matrix )
Returns the result of multiplying this matrix by the given matrix.
QMatrix & QMatrix::operator= ( const QMatrix & matrix )
Assigns the given matrix's values to this matrix.
bool QMatrix::operator== ( const QMatrix & matrix ) const
Returns true if this matrix is equal to the given matrix, otherwise returns false.
Related Non-Members
QPoint operator* ( const QPoint & point, const QMatrix & matrix )
This is an overloaded member function, provided for convenience.
This is the same as matrix.map(point).
See also QMatrix::map().
QPointF operator* ( const QPointF & point, const QMatrix & matrix )
This is an overloaded member function, provided for convenience.
Same as matrix.map(point).
See also QMatrix::map().
QLineF operator* ( const QLineF & line, const QMatrix & matrix )
This is an overloaded member function, provided for convenience.
This is the same as matrix.map(line).
See also QMatrix::map().
QLine operator* ( const QLine & line, const QMatrix & matrix )
This is an overloaded member function, provided for convenience.
This is the same as matrix.map(line).
See also QMatrix::map().
QPolygon operator* ( const QPolygon & polygon, const QMatrix & matrix )
This is an overloaded member function, provided for convenience.
This is the same as matrix.map(polygon).
See also QMatrix::map().
QPolygonF operator* ( const QPolygonF & polygon, const QMatrix & matrix )
This is an overloaded member function, provided for convenience.
This is the same as matrix.map(polygon).
See also QMatrix::map().
QRegion operator* ( const QRegion & region, const QMatrix & matrix )
This is an overloaded member function, provided for convenience.
This is the same as matrix.map(region).
See also QMatrix::map().
QPainterPath operator* ( const QPainterPath & path, const QMatrix & matrix )
This is an overloaded member function, provided for convenience.
This is the same as matrix.map(path).
See also QMatrix::map().
QDataStream & operator<< ( QDataStream & stream, const QMatrix & matrix )
This is an overloaded member function, provided for convenience.
Writes the given matrix to the given stream and returns a reference to the stream.
See also Format of the QDataStream Operators.
QDataStream & operator>> ( QDataStream & stream, QMatrix & matrix )
This is an overloaded member function, provided for convenience.
Reads the given matrix from the given stream and returns a reference to the stream.
See also Format of the QDataStream Operators.
|
|
Best Of
Actualitйs les plus lues
- Pourquoi les programmeurs sont-ils moins payйs que les gestionnaires de programmes ? Manquent-ils de pouvoir de nйgociation ? 42
- Qt Commercial : Digia organise un webinar gratuit le 27 mars sur la conception d'interfaces utilisateur et d'applications avec le framework 0
- Interfaces mobiles : nouveaux usages, nouvelles ergonomies, par Miratech 0
- Implйmentation d'une table de hachage а rйfйrence faible avec Qt, un article de Christophe Dumez traduit par Thibaut Cuvelier 3
- « Quelque chose ne va vraiment pas avec les dйveloppeurs "modernes" », un dйveloppeur а "l'ancienne" critique la multiplication des bibliothиques 94
- Apercevoir la troisiиme dimension ou l'utilisation multithreadйe d'OpenGL dans Qt, un article des Qt Quarterly traduit par Guillaume Belz 0
- Les dйveloppeurs ignorent-ils trop les failles dйcouvertes dans leur code ? Prenez-vous en compte les remarques des autres ? 17
- Pourquoi les programmeurs sont-ils moins payйs que les gestionnaires de programmes ? Manquent-ils de pouvoir de nйgociation ? 42
- Quelles nouveautйs de C++11 Visual C++ doit-il rapidement intйgrer ? Donnez-nous votre avis 10
- Adieu qmake, bienvenue qbs : Qt Building Suite, un outil dйclaratif et extensible pour la compilation de projets Qt 17
- 2017 : un quinquennat pour une nouvelle version du C++ ? Possible, selon Herb Sutter 6

- Linus Torvalds : le "C++ est un langage horrible", en justifiant le choix du C pour le systиme de gestion de version Git 100
- Comment prendre en compte l'utilisateur dans vos applications ? Pour un dйveloppeur, « 90 % des utilisateurs sont des idiots » 229
- Quel est LE livre que tout dйveloppeur doit lire absolument ? Celui qui vous a le plus marquй et inspirй 96
- Apple cиde et s'engage а payer des droits а Nokia, le conflit des brevets entre les deux firmes s'achиve 158
- Nokia porte а nouveau plainte contre Apple pour violation de sept nouveaux brevets 158
- Quel est le code dont vous кtes le plus fier ? Pourquoi l'avez-vous йcrit ? Et pourquoi vous a-t-il donnй autant de satisfaction ? 83
- Le Draft final de la norme C++ 0X validй 181
Le Qt Developer Network au hasard

Livre blanc de l'outillage de Qt Quick
Communautй
Ressources
- 91 cours et tutoriels Qt
- F.A.Q. Qt : 200 questions et rйponses
- 48 Qt Quarterly, 35 Qt Labs et 22 Qt DevNet en franзais
- 43 outils Qt
- 99 sources Qt
- 26 binaires Qt
- 6 livres Qt et 9 critiques
- La documentation de Qt 4.7 en franзais : 157 classes, 70 concepts et 24 modules
- 3 certifications Qt
Liens utiles
Contact
- Vous souhaitez rejoindre la rйdaction ou proposer un tutoriel, une traduction, une question... ? Postez dans le forum Contribuez ou contactez-nous par MP ou par email (voir en bas de page).
Qt dans le magazine
| Cette page est une traduction d'une page de la documentation de Qt, йcrite par Nokia Corporation and/or its subsidiary(-ies). Les йventuels problиmes rйsultant d'une mauvaise traduction ne sont pas imputables а Nokia. | Qt 4.1 | |
| Copyright © 2012 Developpez LLC. Tous droits rйservйs Developpez LLC. Aucune reproduction, mкme partielle, ne peut кtre faite de ce site et de l'ensemble de son contenu : textes, documents et images sans l'autorisation expresse de Developpez LLC. Sinon, vous encourez selon la loi jusqu'а 3 ans de prison et jusqu'а 300 000 E de dommages et intйrкts. Cette page est dйposйe а la SACD. | ||
| Vous avez dйnichй une erreur ? Un bug ? Une redirection cassйe ? Ou tout autre problиme, quel qu'il soit ? Ou bien vous dйsirez participer а ce projet de traduction ? N'hйsitez pas а nous contacter ou par MP ! | ||
Copyright © 2000-2012 - www.developpez.com