|
|



              
QTransformLa classe QTransform dйcrit les transformations 2D d'un systиme de coordonnйes. Plus d'informations... #include <QTransform>Voir la position dans l'arbre des classes. Cette classe a йtй introduite dans Qt 4.3. Description dйtaillйeLa classe QTransform dйcrit les transformations 2D d'un systиme de coordonnйes. Une transformation dйcrit comment translater, redimensionner, tailler, tourner ou projeter le systиme de coordonnйes et est souvent utilisйe lors de rendu graphique. QTransform est diffйrent de QMatrix dans le fait que c'est une vraie matrice 3 × 3, permettant les transformations de perspectives. La mйthode toAffine() de QTransform permet la conversion d'un QTransform en un QMatrix. Si la transformation de perspective a йtй spйcifiйe sur la matrice, alors la conversion va perdre des informations. QTransform est la classe recommandйe dans Qt pour les transformations. Un objet QTransform peut кtre construit en utilisant les fonctions setMatrix(), scale(), rotate(), translate() et shear(). Alternativement, il peut кtre construit en appliquant une des opйrations basiques sur les matrices. La matrice peut aussi кtre dйfinie а la construction et peut кtre rйinitialisйe а la matrice d'identitй (celle par dйfaut) en utilisant la fonction reset(). La classe QTransform supporte le dйplacement des primitives graphiques : un point donnй, une ligne, un polygone, une rйgion ou un painter peuvent кtre dйplacйs au systиme de coordonnйes dйfini par la matrice this avec la fonction map(). Dans le cas d'un rectangle, ses coordonnйes peuvent кtre transformйes en utilisant la fonction mapRect(). Un rectangle peut aussi кtre transformй en un polygone polygon (dйplacй au systиme de coordonnйes dйfini par la matrice this), en utilisant la fonction mapToPolygon(). QTransform fournit la fonction isIdentity() qui retourne true si la matrice est la matrice d'identitй. La fonction isInvertible() retourne true si la matrice n'est pas singuliиre (c'est-а-dire: AB = BA = I). La fonction inverted() retourne une copie inversйe de la matrice this si elle est inversible (sinon, elle retourne la matrice d'identitй) et adjoint() retourne l'adjoint classique de la matrice. De plus, QTranform fournit la fonction determinant() qui retourne le dйterminant de la matrice. Finalement, la classe QTransform supporte la multiplication, l'addition et la soustraction de matrices et les objets de la classe peuvent кtre envoyйs ou reзus sur un flux ainsi que comparйs. Rendu graphiqueLors d'un rendu graphique, la matrice dйfinit les transformations mais la transformation est effectuйe par les routines de dessin de QPainter. Par dйfaut, QPainter opиre sur le systиme de coordonnйes du pйriphйrique associй. Le systиme de coordonnйes standard d'un QPaintDevice a son origine а la position supйrieure gauche. Les valeurs x augmentent en allant vers la droite; les valeurs y, vers le bas. Pour une description complиte, voyez la documentation du systиme de coordonnйes. QPainter a des fonctions pour translater, redimensionner, tailler et tourner le systиme de coordonnйes sans utiliser un QTransform. Par exemple :
Bien que ces fonctions soient trиs commodes, il peut кtre plus efficace de construire un QTransform et appeler QPainter::setTransform() si vous souhaitez effectuer plus d'une seule transformation. Par exemple :
Opйrations basiques sur les matrices
QTransform transforme un point dans un plan vers un autre point en utilisant les formules suivantes : x' = m11*x + m21*y + dx
y' = m22*y + m12*x + dy
if (is not affine) {
w' = m13*x + m23*y + m33
x' /= w'
y' /= w'
}Le point (x, y) est le point d'origine et (x›, y›) est le point transformй. (x›, y›) peut redevenir (x, y) en appliquant la mкme opйration avec la matrice inverse. Les diffйrents йlйments de la matrice peuvent кtre dйfinis а la construction ou en utilisant la fonction setMatrix(). Ils peuvent aussi кtre modifiйs en utilisant les fonctions de commoditйs translate(), rotate(), scale() et shear(). Les valeurs actuelles peuvent кtre rйcupйrйes avec les fonctions m11(), m12(), m13(), m21(), m22(), m23(), m31(), m32(), m33(), dx() et dy(). La translation est la plus simple des transformations. La dйfinition de dx et dy va dйplacer le systиme de coordonnйes de dx unitйs suivant l'axe des X et de dy unitйs suivant l'axe des Y. Le redimensionnement peut кtre effectuй en dйfinissant m11 et m22. Par exemple, la dйfinition de m11 а 2 et de m22 а 1.5 va doubler la hauteur et augmenter la largeur de 50 %. La matrice d'identitй a m11, m22 et m33 dйfinis а 1 (tous les autres йlйments sont а 0) dйplace un point sur lui-mкme. Le taillage est contrфlй par m12 et m21. Dйfinir ces йlйments а des valeurs diffйrentes de zйro tortillera le systиme de coordonnйes. La rotation peut кtre obtenue en dйfinissant а la fois les facteurs de taille et les facteurs de redimensionnement. La transformation de perspective est obtenue en dйfinissant а la fois les facteurs de projection et les facteurs de redimensionnement. Voici un exemple de combinaison des transformations :
Voir aussi QPainter, Coordinate System, dйmo de transformations affines et exemple des transformations. Typeenum QTransform::TransformationType
Fonctions membresQTransform::QTransform ()Construit une matrice d'identitй. Tous les йlйments sont dйfinis а zйro sauf m11 et m22 (dйfinissant le redimensionnement) et m13 qui sont dйfinis а 1. Voir aussi reset(). QTransform::QTransform ( qreal m11, qreal m12, qreal m13, qreal m21, qreal m22, qreal m23, qreal m31, qreal m32, qreal m33 = 1.0 )Construit une matrice avec les йlйments m11, m12, m13, m21, m22, m23, m31, m32 et m33. Voir aussi setMatrix(). QTransform::QTransform ( qreal m11, qreal m12, qreal m21, qreal m22, qreal dx, qreal dy )Construit une matrice avec les йlйments m11, m12, m21, m22, dx et dy. Voir aussi setMatrix(). QTransform::QTransform ( const QMatrix & matrix )Construit une matrice qui est une copie de la matrice matrix donnйe. Notez que les йlйments m13, m23 et m33 sont dйfinis а 0, 0 et 1 respectivement. qreal QTransform::m11 () constRetourne le facteur de redimensionnement horizontal. Voir aussi scale() et opйrations basiques sur les matrices. qreal QTransform::m12 () constRetourne le facteur de taille verticale. Voir aussi shear() et opйrations basiques sur les matrices. qreal QTransform::m13 () constRetourne le facteur de projection horizontale. Voir aussi translate() et opйrations basiques sur les matrices. qreal QTransform::m21 () constRetourne le facteur de taille horizontale. Voir aussi shear() et opйrations basiques sur les matrices. qreal QTransform::m22 () constRetourne le facteur de redimensionnement vertical. Voir aussi scale() et opйrations basiques sur les matrices. qreal QTransform::m23 () constRetourne le facteur de projection verticale. Voir aussi translate() et opйrations basiques sur les matrices. qreal QTransform::m31 () constRetourne le facteur de translation horizontale. Voir aussi dx(), translate() et opйrations basiques sur les matrices. qreal QTransform::m32 () constRetourne le facteur de translation verticale. Voir aussi dy(), translate() et opйrations basiques sur les matrices. qreal QTransform::m33 () constRetourne le facteur de division. Voir aussi translate() et opйrations basiques sur les matrices. QTransform QTransform::adjoint () constRetourne l'adjoint de cette matrice. qreal QTransform::determinant () constRetourne le dйterminant de cette matrice. qreal QTransform::dx () constRetourne le facteur de translation horizontale. Voir aussi m31(), translate() et opйrations basiques sur les matrices. qreal QTransform::dy () constRetourne le facteur de translation verticale. Voir aussi translate() et opйrations basiques sur les matrices. QTransform QTransform::fromScale ( qreal sx, qreal sy ) [static]Crйe une matrice correspondante au redimensionnement horizontal sx et vertical sy. C'est la mкme chose que la fonction QTransform().scale(sx, sy) mais lйgиrement plus rapide. Cette fonction a йtй introduite dans Qt 4.5. QTransform QTransform::fromTranslate ( qreal dx, qreal dy ) [static]Crйe une matrice correspondant а la translation de dx suivant l'axe des X et dy suivant l'axe des Y. C'est la mкme chose que la fonction QTransform().translate(dx, dy) mais lйgиrement plus rapide. Cette fonction a йtй introduite dans Qt 4.5. QTransform QTransform::inverted ( bool * invertible = 0 ) constRetourne une copie inversйe de cette matrice. Si la matrice est singuliиre (non inversible), la matrice retournйe est la matrice d'identitй. Si le paramиtre invertible est valide (c'est-а-dire, non null), sa valeur est dйfinie а true si la matrice est inversible, sinon il est dйfini а false. Voir aussi isInvertible(). bool QTransform::isAffine () constRetourne true si la matrice reprйsente une transformation affine, sinon retourne false. bool QTransform::isIdentity () constRetourne true si la matrice est la matrice d'identitй, sinon retourne false. Voir aussi reset(). bool QTransform::isInvertible () constRetourne true si la matrice est inversible, sinon retourne false. Voir aussi inverted(). bool QTransform::isRotating () constRetourne true si la matrice reprйsente une rotation quelconque, sinon retourne false. Voir aussi reset(). bool QTransform::isScaling () constRetourne true si la matrice reprйsente un redimensionnement quelconque, sinon retourne false. Voir aussi reset(). bool QTransform::isTranslating () constRetourne true si la matrice reprйsente une translation quelconque, sinon retourne false. Voir aussi reset(). void QTransform::map ( qreal x, qreal y, qreal * tx, qreal * ty ) constDйplace les coordonnйes x et y donnйes dans le systиme de coordonnйes dйfini par cette matrice. Le rйsultat est insйrй dans *tx et *ty, respectivement. Les coordonnйes sont transformйes en appliquant les formules suivantes : x' = m11*x + m21*y + dx
y' = m22*y + m12*x + dy
if (is not affine) {
w' = m13*x + m23*y + m33
x' /= w'
y' /= w'
}Le point (x, y) est le point original et (x›, y›) le point transformй. Voir aussi opйrations basiques sur les matrices. QPointF QTransform::map ( const QPointF & p ) constIl s'agit d'une fonction surchargйe. Crйe et retourne un objet QPointF qui est une copie du point p donnй une fois dйplacй dans le systиme de coordonnйes dйfini par cette matrice. QPoint QTransform::map ( const QPoint & point ) constIl s'agit d'une fonction surchargйe. Crйe et retourne un objet QPoint qui est une copie du point point donnй une fois dйplacй dans le systиme de coordonnйes dйfini par cette matrice. Notez que les coordonnйes transformйes sont arrondies а l'entier le plus proche. QLine QTransform::map ( const QLine & l ) constIl s'agit d'une fonction surchargйe. Crйe et retourne un objet QLineF qui est une copie de la ligne l donnйe une fois dйplacйe dans le systиme de coordonnйes dйfini par cette matrice. QLineF QTransform::map ( const QLineF & line ) constIl s'agit d'une fonction surchargйe. Crйe et retourne un objet QLine qui est une copie de la ligne line donnйe une fois dйplacйe dans le systиme de coordonnйes dйfini par cette matrice. Notez que les coordonnйes transformйes sont arrondies а l'entier le plus proche. QPolygonF QTransform::map ( const QPolygonF & polygon ) constIl s'agit d'une fonction surchargйe. Crйe et retourne un objet QPolygonF qui est une copie du polygone polygon donnй une fois dйplacй dans le systиme de coordonnйes dйfini par cette matrice. QPolygon QTransform::map ( const QPolygon & polygon ) constIl s'agit d'une fonction surchargйe. Crйe et retourne un objet QPolygon qui est une copie du polygone polygon donnй une fois dйplacй dans le systиme de coordonnйes dйfini par cette matrice. Notez que les coordonnйes transformйes sont arrondies а l'entier le plus proche. QRegion QTransform::map ( const QRegion & region ) constIl s'agit d'une fonction surchargйe. Crйe et retourne un objet QRegion qui est une copie de la rйgion region donnйe une fois dйplacйe dans le systиme de coordonnйes dйfini par cette matrice. L'appel de cette mйthode peut кtre couteux si des rotations ou taillages sont utilisйs. QPainterPath QTransform::map ( const QPainterPath & path ) constIl s'agit d'une fonction surchargйe. Crйe et retourne un objet QPainterPath qui est une copie du chemin path donnй une fois dйplacй dans le systиme de coordonnйes dйfini par cette matrice. void QTransform::map ( int x, int y, int * tx, int * ty ) constIl s'agit d'une fonction surchargйe. Dйplace les coordonnйes x et y donnйes dans le systиme de coordonnйes de cette matrice. Le rйsultat est insйrй dans *tx et *ty, respectivement. Notez que les coordonnйes transformйes sont arrondies а l'entier le plus proche. QRectF QTransform::mapRect ( const QRectF & rectangle ) constCrйe et retourne un objet QRectF qui est une copie du rectangle donnй une fois dйplacй dans le systиme de coordonnйes dйfini par cette matrice. Les coordonnйes du rectangle sont transformйes en utilisant les formules suivantes : x' = m11*x + m21*y + dx
y' = m22*y + m12*x + dy
if (is not affine) {
w' = m13*x + m23*y + m33
x' /= w'
y' /= w'
}Si une rotation ou un taillage a йtй spйcifiй, cette fonction retourne le rectangle englobant. Pour rйcupйrer la rйgion exacte oщ le rectangle a йtй dйplacй, utilisez la fonction mapToPolygon() а la place. Voir aussi mapToPolygon() et opйrations basiques sur les matrices. QRect QTransform::mapRect ( const QRect & rectangle ) constIl s'agit d'une fonction surchargйe. Crйe et retourne un objet QRect qui est une copie du rectangle donnй une fois dйplacй dans le systиme de coordonnйes dйfini par cette matrice. Notez que les coordonnйes transformйes sont arrondies а l'entier le plus proche. QPolygon QTransform::mapToPolygon ( const QRect & rectangle ) constCrйe et retourne une reprйsentation QPolygon du rectangle donnй une fois dйplacй dans le systиme de coordonnйes dйfini par cette matrice. Les coordonnйes du rectangle sont transformйes en utilisant les formules suivantes : x' = m11*x + m21*y + dx
y' = m22*y + m12*x + dy
if (is not affine) {
w' = m13*x + m23*y + m33
x' /= w'
y' /= w'
}Les polygones et les rectangles se comportent lйgиrement diffйremment lors d'une transformation (а cause de l'arrondi а l'entier), donc matrix.map(QPolygon(rectangle)) n'est pas toujours identique а matrix.mapToPolygon(rectangle). Voir aussi mapRect() et opйrations basiques sur les matrices. bool QTransform::quadToQuad ( const QPolygonF & one, const QPolygonF & two, QTransform & trans ) [static]Crйe une matrice de transformation, trans, qui dйplace un polygone а quatre cфtйs, one, а un autre polygone а quatre cфtйs, two. Retourne true si la transformation est possible ; sinon retourne false. Ceci est une fonction de commoditй combinant les fonctions quadToSquare() et squareToQuad(). Elle permet а un quad d'entrйe d'кtre transformй en un autre quad. Voir aussi squareToQuad() et quadToSquare(). bool QTransform::quadToSquare ( const QPolygonF & quad, QTransform & trans ) [static]Crйe une matrice de transformation, trans, qui dйplace un polygone а quatre cфtйs, one, а un carrй unitaire. Retourne true si la transformation est construite ou false si elle n'existe pas. Voir aussi squareToQuad() et quadToQuad(). void QTransform::reset ()Rйinitialise la matrice а une matrice d'identitй, c'est-а-dire, tous les йlйments sont dйfinis а zйro, sauf m11 et m22 (dйfinissant le redimensionnement) et m33 qui sont dйfinis а 1. Voir aussi QTransform(), isIdentity() et opйrations basiques sur les matrices. QTransform & QTransform::rotate ( qreal angle, Qt::Axis axis = Qt::ZAxis )Tourne le systиme de coordonnйes dans le sens inverse des aiguilles d'une montre de l‹angle donnй autour des axes axis spйcifiйs et retourne une rйfйrence de la matrice. Notez que si vous appliquez un QTransform а un point dйfini dans les coordonnйes d'un widget, la direction de la rotation va кtre dans le sens des aiguilles d'une montre car l'axe des Y pointe vers le bas. L'angle est spйcifiй en degrйs. Voir aussi setMatrix(). QTransform & QTransform::rotateRadians ( qreal angle, Qt::Axis axis = Qt::ZAxis )Tourne le systиme de coordonnйes dans le sens inverse des aiguilles d'une montre de l‹angle donnй autour des axes axis spйcifiйs et retourne une rйfйrence de la matrice. Notez que si vous appliquez un QTransform а un point dйfini dans les coordonnйes d'un widget, la direction de la rotation va кtre dans le sens des aiguilles d'une montre car l'axe des Y pointe vers le bas. L'angle est spйcifiй en radians. Voir aussi setMatrix(). QTransform & QTransform::scale ( qreal sx, qreal sy )Redimensionne le systиme de coordonnйes horizontalement de sx et verticalement de sy et retourne une rйfйrence de la matrice. Voir aussi setMatrix(). void QTransform::setMatrix ( qreal m11, qreal m12, qreal m13, qreal m21, qreal m22, qreal m23, qreal m31, qreal m32, qreal m33 )Dйfinit les йlйments de la matrice aux valeurs spйcifiйes, m11, m12, m13 m21, m22, m23 m31, m32 et m33. Notez que cette fonction remplace les valeurs prйcйdentes. QTransform fournit les fonctions de commoditйs translate(), rotate(), scale() et shear() pour manipuler les йlйments de la matrice basйs sur le systиme de coordonnйes actuel. Voir aussi QTransform(). QTransform & QTransform::shear ( qreal sh, qreal sv )Taille le systиme de coordonnйes horizontalement de sh et verticalement de sv et retourne une rйfйrence de la matrice. Voir aussi setMatrix(). bool QTransform::squareToQuad ( const QPolygonF & quad, QTransform & trans ) [static]Crйe une matrice de transformation, trans, qui dйplace un carrй unitaire vers un polygone а quatre cфtйs, quad. Retourne true si la transformation est construite ou false si la transformation n'existe pas. Voir aussi quadToSquare() et quadToQuad(). const QMatrix & QTransform::toAffine () constRetourne le QTransform comme une matrice affine. Attention : si une transformation de perspective a йtй dйfinie, alors la conversion provoquera une perte de donnйes. QTransform & QTransform::translate ( qreal dx, qreal dy )Dйplace le systиme de coordonnйes de dx suivant l'axe des X et de dy suivant l'axe des Y et retourne une rйfйrence de la matrice. Voir aussi setMatrix(). QTransform QTransform::transposed () constRetourne la transposйe de cette matrice. TransformationType QTransform::type () constRetourne le type de transformation de cette matrice. Le type de transformation est la plus haute valeur de l'enum capturant toutes les transformations de la matrice. Par exemple, si la matrice redimensionne et taille, le type sera TxShear, car TxShear a une plus haute valeur que TxScale. Connaоtre le type de transformation de la matrice est utile pour optimiser : vous pouvez souvent gйrer des types spйcifiques plus rapidement que de gйrer les cas gйnйraux. QTransform::operator QVariant () constRetourne la transformation comme un QVariant. bool QTransform::operator!= ( const QTransform & matrix ) constRetourne true si cette matrice n'est pas йgale а la matrice matrix donnйe, sinon retourne false. QTransform QTransform::operator* ( const QTransform & matrix ) constRetourne le rйsultat de la multiplication de cette matrice avec la matrice matrix donnйe. Notez que la multiplication de matrice n'est pas commutative, c'est-а-dire a*b != b*a. QTransform & QTransform::operator*= ( const QTransform & matrix )Il s'agit d'une fonction surchargйe. Retourne le rйsultat de la multiplication de cette matrice avec la matrice matrix donnйe. QTransform & QTransform::operator*= ( qreal scalar )Il s'agit d'une fonction surchargйe. Retourne le rйsultat de la multiplication d'un facteur scalar donnй avec les йlйments de la matrice. QTransform & QTransform::operator+= ( qreal scalar )Il s'agit d'une fonction surchargйe. Retourne la matrice obtenue en ajoutant le facteur scalar donnй а chaque йlйment de cette matrice. QTransform & QTransform::operator-= ( qreal scalar )Il s'agit d'une fonction surchargйe. Retourne la matrice obtenue en soustrayant le facteur scalar donnй а chaque йlйment de cette matrice. QTransform & QTransform::operator/= ( qreal scalar )Il s'agit d'une fonction surchargйe. Retourne le rйsultat de la division d'un facteur scalar donnй avec les йlйments de la matrice. QTransform & QTransform::operator= ( const QTransform & matrix )Assigne la matrice matrix donnйe а cette matrice. bool QTransform::operator== ( const QTransform & matrix ) constRetourne true si cette matrice est йgale а la matrice matrix donnйe, sinon retourne false. En relation mais non membres de la classebool qFuzzyCompare ( const QTransform & t1, const QTransform & t2 )Retourne true si t1 et t2 sont йgaux. La comparaison utilise un petit facteur flou dans la comparaison des nombres а virgule flottante ; La fonction retourne false si elles sont diffйrentes. Cette fonction a йtй introduite dans Qt 4.6. QPoint operator* ( const QPoint & point, const QTransform & matrix )Identique а matrix.map(point). Voir aussi QTransform::map(). QPointF operator* ( const QPointF & point, const QTransform & matrix )Identique а matrix.map(point). Voir aussi QTransform::map(). QLineF operator* ( const QLineF & line, const QTransform & matrix )Identique а matrix.map(line). Voir aussi QTransform::map(). QLine operator* ( const QLine & line, const QTransform & matrix )Identique а matrix.map(line). Voir aussi QTransform::map(). QPolygon operator* ( const QPolygon & polygon, const QTransform & matrix )Identique а matrix.map(polygon). Voir aussi QTransform::map(). QPolygonF operator* ( const QPolygonF & polygon, const QTransform & matrix )Identique а matrix.map(polygon). Cette fonction a йtй introduite dans Qt 4.3. Voir aussi QTransform::map(). QRegion operator* ( const QRegion & region, const QTransform & matrix )Identique а matrix.map(region). Voir aussi QTransform::map(). QPainterPath operator* ( const QPainterPath & path, const QTransform & matrix )Identique а matrix.map(path). Cette fonction a йtй introduite dans Qt 4.3. Voir aussi QTransform::map(). QDataStream & operator<< ( QDataStream & stream, const QTransform & matrix )Йcrit la matrice matrix donnйe sur le flux stream et retourne une rйfйrence sur le fux. Cette fonction a йtй introduite dans Qt 4.3. Voir aussi sйrialisation des types de donnйes Qt. QDataStream & operator>> ( QDataStream & stream, QTransform & matrix )Lit la matrice matrix а partir du flux stream et retourne une rйfйrence sur le flux. Cette fonction a йtй introduite dans Qt 4.3. Voir aussi sйrialisation des types de donnйes Qt. RemerciementsMerci а Alexandre Laurent pour la traduction ainsi qu'а Emmanuel Di Clemente, Jonathan Courtois et Claude Leloup pour leur relecture ! |
Publicitй
Best OfActualitйs les plus luesSemaine
Mois
Annйe

Le Qt Quarterly au hasard
Poppler : afficher des fichiers PDF avec QtQt Quarterly est la revue trimestrielle proposйe par Nokia et а destination des dйveloppeurs Qt. Ces articles d'une grande qualitй technique sont rйdigйs par des experts Qt. Lire l'article.
CommunautйRessources
Liens utilesContact
Qt dans le magazine |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
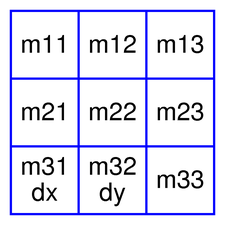 Un objet QTransform contient une matrice 3 × 3. Les йlйments m31 (dx) et m32 (dy) dйsignent les translations horizontale et verticale. Les йlйments m11 et m22 dйsignent les redimensionnements horizontal et vertical. Les йlйments m21 et m12 dйsignent les taillages horizontal et vertical. Finalement, les йlйments m13 et m23 dйsignent les projections horizontale et verticale, avec m33 comme facteur additionnel de projection.
Un objet QTransform contient une matrice 3 × 3. Les йlйments m31 (dx) et m32 (dy) dйsignent les translations horizontale et verticale. Les йlйments m11 et m22 dйsignent les redimensionnements horizontal et vertical. Les йlйments m21 et m12 dйsignent les taillages horizontal et vertical. Finalement, les йlйments m13 et m23 dйsignent les projections horizontale et verticale, avec m33 comme facteur additionnel de projection.
| Cette page est une traduction d'une page de la documentation de Qt, йcrite par Nokia Corporation and/or its subsidiary(-ies). Les йventuels problиmes rйsultant d'une mauvaise traduction ne sont pas imputables а Nokia. | Qt 4.7 | |
| Copyright © 2012 Developpez LLC. Tous droits rйservйs Developpez LLC. Aucune reproduction, mкme partielle, ne peut кtre faite de ce site et de l'ensemble de son contenu : textes, documents et images sans l'autorisation expresse de Developpez LLC. Sinon, vous encourez selon la loi jusqu'а 3 ans de prison et jusqu'а 300 000 E de dommages et intйrкts. Cette page est dйposйe а la SACD. | ||
| Vous avez dйnichй une erreur ? Un bug ? Une redirection cassйe ? Ou tout autre problиme, quel qu'il soit ? Ou bien vous dйsirez participer а ce projet de traduction ? N'hйsitez pas а nous contacter ou par MP ! | ||
Copyright © 2000-2012 - www.developpez.com